M3-RS-U2-4.5-360 Rotary Stage
We are thrilled to announce our new product, the M3-RS-U2-4.5-360 Rotary Stage!
This new stage features all of our standard M3 ease of integration, compact size with embedded controller, and point-to-point angular positioning with closed-loop resolution of better than 0.022 degrees
Description
 Smallest size, high resolution
Smallest size, high resolution
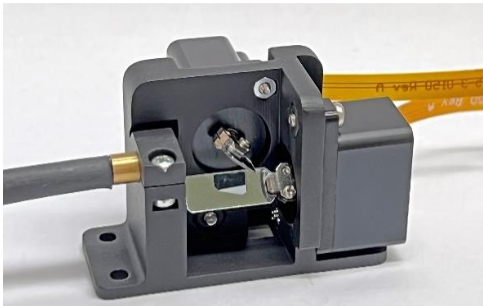
The M3-RS-U2-4.5-360 Rotary Smart Stage is a miniature, “all-in-one” rotary positioning stage with closed-loop position resolution better than 0.022 degrees. It provides continuous 360° rotation with absolute position feedback.
The compact housing measures only 11.75 mm long x 21.9 mm wide x 16 mm tall and incorporates a built-in controller with all drive electronics and embedded firmware, along with patented piezoelectric motors, position sensors and bearings.
With no need for an external controller, this smart stage enables smallest system size in hand-held and portable instruments.
Embedded controller for fastest integration
The embedded controller also means rapid and easy integration into your system. It accepts direct input of high-level digital motion commands from your system processor over UART, SPI, I2C or analog servo interface.
Developer’s kits include a USB adapter for PC control, and New Scale Pathway™ software for evaluation and system development.
Low power use for battery-powered systems
The positioning module needs only 3.3 V DC and uses approximately 750 mW when moving. It can be powered by USB or standard batteries. The integrated piezo motor holds position without using power.
Advantages
- Smallest size: 11.75 x 21.9 x 16 mm including controller
- Closed-loop controller embedded in micro stage
- No separate electronics needed
- 3.3 VDC input
- Direct input of motion commands (I2C, SPI, UART or analog servo)
- Angular resolution ~ 0.022 deg closed loop
- Absolute encoding and position feedback
- Millisecond step and settle times
- Point-to-point angular positioning with closed-loop bandwidth ~100Hz
- Holds position with zero power and no jitter
- Fast integration for embedded motion in smaller instruments
Applications
Scientific and industrial instruments requiring precise rotational positioning in a limited space, including:
Medical
- Dermatology lasers
- Fluorescence microscopes
- 3D imaging instruments
- In-vivo and in-vitro micro laser surgery
Telecommunications
- Free-space optical communication
- Variable optical attenuation
- Fiber-to-fiber optical switching
Industrial
- 3D printers
- LIDAR, 3D measurement, spectroscopy
- Remote sensing (e.g. pollution)
- Image/hand tremor stabilization
- Laser marking and machining
Aerospace and Defense
- Target designation, jitter compensation
- Automated obstacle detection, tracking and avoidance for robots, UAVs, etc.
Specifications
Specifications
| Attribute | Value |
|---|---|
| Range of motion | 360 degree continuous rotation |
| Speed | >1100 deg/sec |
| Acceleration* | >1,000,000 deg/sec² |
| Stall torque (min) | 0.04 N-mm |
| Holding torque (min) | 0.08 N-mm (zero power) |
| Recommended maximum payload mounted to rotating shaft (payload must be balanced) | |
| Mass | 3 g |
| Inertia | 350 g-mm² |
| CLOSED-LOOP performance (with built-in position sensor) | |
| Recommended step frequency | up to 100 Hz |
| Resolution (absolute encoder resolution) | 0.022 deg absolute |
| Repeatability | +/- 0.05 deg (880 µrad) |
| Accuracy | 0.25 deg (4400 µrad) |
| Closed loop step & settle times (typical)* | 0.5 deg step: 16 ms 5 deg step: 22 ms 20 deg step: 31 ms |
| OPEN-LOOP performance (external position sensor provided by user – see application note) |
|
| Open loop step & settle times (typical)* | 0.05 deg step: 0.5 ms 0.5 deg step: 1.2 ms 5 deg step: 5 ms 20 deg step: 11.2 ms |
| Input voltage | 3.3 VDC +/-10% |
| Power consumption (typical) | 750 mW active, moving 190 mW active, ready 50 mW standby |
| Stage mass | 4.7 g |
| Operational lifetime | >2 million random positions or seven years, whichever occurs first |
| Temperature and relative humidity | 0 to +60 °C, non-condensing |
| Conformance | RoHS; CE pending |
| Controller | Integrated into stage, 64 MIPS no external controller needed |
| Communication interface: | I²C, SPI, UART or analog servo Input directly to M3-RS |
*With 0.6 g-mm2 inertial load mounted to output shaft, based on a target tolerance of 2 encoder counts
Documentation
Download / View Documentation
 Loading...
Loading...
Loading...